Modellnr.:
AGVC-24V100A-YT
Produktnamn:
24V100A litiumbatteriladdare AGVC-24V100A-YT för automatiskt styrda fordon




PRODUKTVIDEO
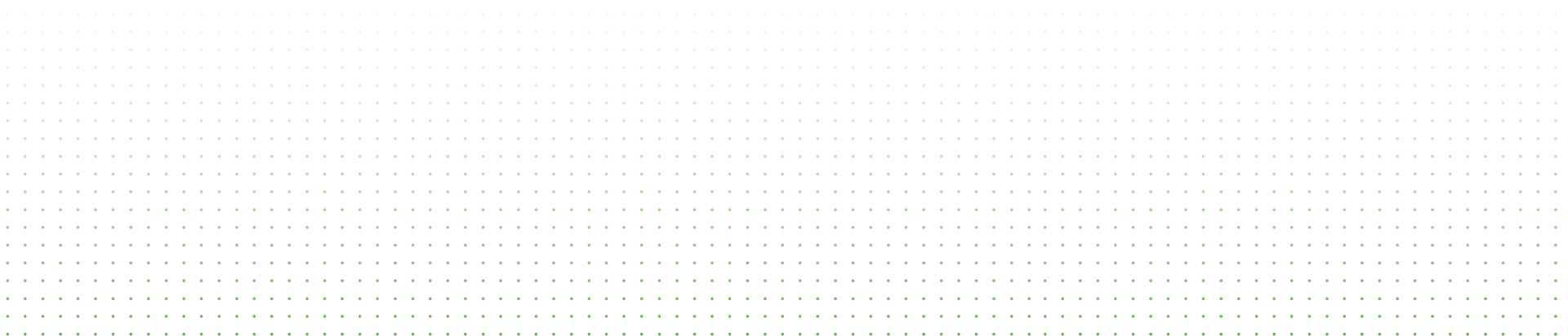
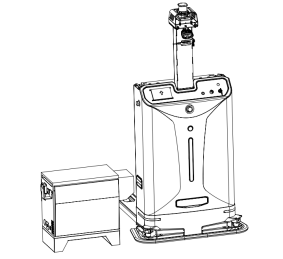
INSTRUKTIONSRITNING

EGENSKAPER OCH FÖRDELAR
-
PFC+LLC mjukkopplingsteknik används för att säkerställa hög effektfaktor, låga strömövertoner, litet spännings- och strömrippel, omvandlingseffektivitet så hög som 94 % och hög moduleffekttäthet.
01 -
Med CAN-kommunikation kan den kommunicera med litiumbatteriets BMS för att intelligent hantera batteriladdningen och säkerställa snabb laddning och längre batteritid.
02 -
Ergonomisk design och användarvänligt användargränssnitt, inklusive LCD-skärm, pekskärm, LED-indikatorlampa och knappar. Slutanvändare kan se laddningsinformation och status, utföra olika åtgärder och inställningar.
03 -
Med skydd mot överladdning, överspänning, överström, övertemperatur, kortslutning, fasförlust på ingången, överspänning på ingången, underspänning på ingången, onormal laddning av litiumbatterier samt diagnos och visning av laddningsproblem.
04 -
I automatiskt läge kan den laddas automatiskt utan att övervakas av en person. Den har även manuellt läge.
05 -
Med teleskopfunktion; Stöder trådlös dispatching, infraröd positionering och CAN-, WIFI- eller trådbunden kommunikation.
06 -
Trådlös sändning med 2,4G, 4G eller 5,8G. Infraröd positionering för sändning och mottagning, reflektion eller diffus reflektion. Anpassning möjlig för borste och borsthöjd.
07 -
Brett ingångsspänningsområde som kan ge batteriet stabil och pålitlig laddning även vid instabil strömförsörjning.
08 -
Smart teleskopteknik för att kunna ladda AGV med laddningsport på sidan.
09 -
Högprecisions infraröd fotoelektrisk sensor för att säkerställa mer exakt positionering.
010 -
Kan laddas för AGV med laddningsport på sidan, framtill eller undertill.
011 -
Trådlös kommunikation för att smart få AGV-laddare att kommunicera och ansluta AGV. (en AGV till en eller flera AGV-laddare, en AGV-laddare till en eller flera AGV)
012 -
Borste i stål-kollegering med hög elektrisk ledningsförmåga. Stark mekanisk hållfasthet, utmärkt isolering, hög värmebeständighet och hög korrosionsbeständighet.
013

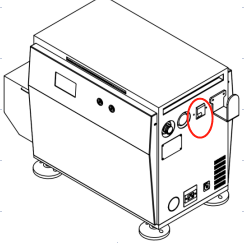
ANSÖKAN
Att tillhandahålla snabb, säker och AUTOMATISK laddning för AGV (Automated Guided Vehicle) inklusive AGV-gaffeltruckar, logistiksorterings-AGV:er, latenta dragfordon, intelligenta parkeringsrobotar och tunga dragfordon på flygplatser, hamnar och gruvor.






SPECIFIKATIONER
| MmodellInga. | AGVC-24V100A-YT |
| BetygsattIingångVålderdom | 220 V AC ± 15 % |
| InputVålderdomRängel | Enfas trefas |
| InputCnuvarandeRängel | <16A |
| BetygsattOutgångPkraft | 2,4 kW |
| BetygsattOutgångCnuvarande | 100A |
| ProduktionVålderdomRängel | 16VDC-32VDC |
| NuvarandeLimiteraAjusterbarRängel | 5A–100A |
| ToppNoise | ≤1% |
| SpänningRregleringAnoggrannhet | ≤±0,5% |
| NuvarandeSharing | ≤±5% |
| Effektivitet | Utgångsbelastning ≥ 50 %, vid nominell drift, total verkningsgrad ≥ 92 %; |
| Utgångsbelastning <50%, vid nominell drift är hela maskinens effektivitet ≥99% | |
| Skydd | Kortslutning, överström, överspänning, omvänd anslutning, omvänd ström |
| Frekvens | 50Hz–60Hz |
| Effektfaktor (PF) | ≥0,99 |
| Strömförvrängning (HD1) | ≤5% |
| InputPskydd | Överspänning, underspänning, överström |
| ArbetssättEmiljöCvillkor | Inomhus |
| ArbetssättTtemperatur | -20%~45℃, normal drift; 45℃~65℃, minskad effekt; över 65℃, avstängning. |
| LagringTtemperatur | -40℃–75℃ |
| RelativHfukt | 0–95 % |
| Höjd över havet | ≤2000m full belastningsutgång; >2000m använd den i enlighet med bestämmelserna i 5.11.2 i GB/T389.2-1993. |
| DielektriskSstyrka
| IN-UT: 2800VDC/10mA/1Min |
| INNE-SKALET: 2800VDC/10mA/1Min | |
| YTTERSKAL: 2800VDC/10mA/1Min | |
| Mått ochWåtta | |
| Mått (allt-i-ett)) | 530 (H) × 580 (B) × 390 (D) |
| NettoWåtta | 35 kg |
| Grad avPskydd | IP20 |
| Andras | |
| BMSCkommunikationMmetod | CAN-kommunikation |
| BMSCanslutningMmetod | CAN-WIFI eller fysisk kontakt mellan CAN-moduler vid AGV och laddare |
| Avsändning CkommunikationMmetod | Modbus TCP, Modbus AP |
| Avsändning CanslutningMmetod | Modbus-wifi eller Ethernet |
| WIFI-band | 2,4G, 4G eller 5,8G |
| Läge för att starta laddning | Infraröd, Modbus, CAN-WIFI |
| AGVBorste Pparametrar | Följ AiPower-standarden eller ritningar som tillhandahålls av kunder |
| Struktur avCladdare | Allt i ett |
| LaddningMmetod | Borste Teleskopisk |
| Kylningsmetod | Tvingad luftkylning |
| TeleskopiskPenseldrag | 200MM |
| Bra Davståndför Ppositionering | 185MM–325MM |
| Höjd frånAGVBorsta mitten till Grunda | 90MM-400MM; Anpassning tillgänglig |
INSTALLATIONSGUIDE
Packa upp trälådan. Använd professionella verktyg.
2. Använd en skruvmejsel för att demontera skruvarna längst ner på trälådan som håller fast elbilsladdaren.

Placera laddaren horisontellt och justera benen för att säkerställa rätt laddningsposition. Se till att hinder är mer än 0,5 m från laddarens vänstra och högra sida.

Om laddarens strömbrytare är avstängd, anslut laddarens kontakt till uttaget baserat på antalet faser. Be gärna fackmän att göra detta arbete.

Att göra och inte göra vid installation
- Placera laddaren vågrätt. Placera laddaren på något som är värmebeständigt. Ställ den INTE upp och ner. Se till att den INTE lutar.
- Laddaren behöver tillräckligt med utrymme för kylning. Se till att avståndet mellan luftinloppet och väggen är mer än 300 mm, och avståndet mellan väggen och luftutloppet är mer än 1000 mm.
- Laddaren kommer att generera värme under drift. För att säkerställa god kylning, se till att laddaren fungerar i en miljö där temperaturen är -20 % ~ 45 ℃.
- Se till att främmande föremål som fibrer, pappersbitar, träflis eller metallfragment INTE kommer in i laddaren, eftersom det annars kan orsaka brand.
- Rör INTE borsten eller borstelektroden efter att du har anslutit den till strömförsörjningen. Detta kan orsaka risk för elektriska stötar.
- Jordterminalen MÅSTE vara väl jordad för att förhindra elektriska stötar eller brand.

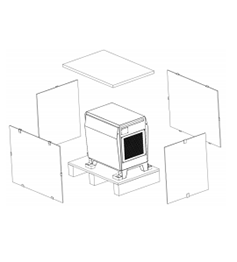
BRUKSANVISNING
-
01
Slå på strömbrytaren för att försätta maskinen i standby-läge.
-
02
2. AGV skickar en signal som ber om laddning när AGV:n inte har tillräckligt med ström.
-
03
AGV:n kommer att röra sig till laddaren av sig själv och positionera med laddaren.
-
04
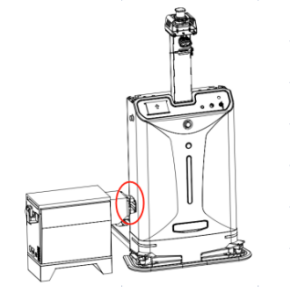
När positioneringen är korrekt gjord sticker laddaren automatiskt ut sin borste i AGV:ns laddningsport för att ladda AGV:n.
-
05
När laddningen är klar dras laddarens borste automatiskt in och laddaren återgår till standbyläge.

Att göra och inte göra i drift
- Se till att laddaren endast ansluts till strömförsörjningen under ledning av fackmän.
- Se till att laddaren är torr och fri från främmande föremål inuti när den används.
- Se till att hinder är mer än 0,5 m från laddarens vänstra och högra sida.
- Rengör luftinloppet och -utloppet var 30:e kalenderdag.
- Demontera inte laddaren själv, det kan orsaka elektriska stötar. Laddaren kan skadas under demonteringen och du kan inte få tillgång till kundservice efter köpet på grund av detta.



