Numer modelu:
AGVC-24V100A-YT
Nazwa produktu:
Ładowarka akumulatorów litowych 24V100A AGVC-24V100A-YT do pojazdów sterowanych automatycznie




FILM PRODUKTOWY
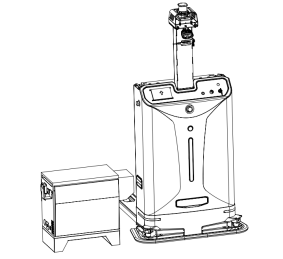
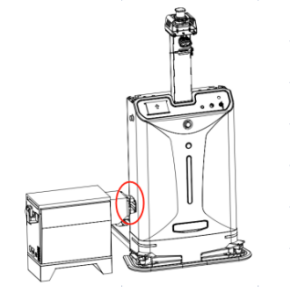
RYSUNEK INSTRUKCYJNY

CECHY I ZALETY
-
Technologia miękkiego przełączania PFC+LLC zapewnia wysoki współczynnik mocy, niskie harmoniczne prądu, małe tętnienia napięcia i prądu, sprawność konwersji na poziomie 94% oraz wysoką gęstość mocy modułu.
01 -
Dzięki komunikacji CAN urządzenie może komunikować się z systemem BMS akumulatora litowego, aby inteligentnie zarządzać ładowaniem akumulatora i zapewnić jego szybkie ładowanie oraz dłuższą żywotność.
02 -
Ergonomiczny wygląd i przyjazny dla użytkownika interfejs, obejmujący wyświetlacz LCD, panel dotykowy, diodę LED i przyciski. Użytkownicy mogą przeglądać informacje o ładowaniu i jego stanie, wykonywać różne operacje i konfigurować ustawienia.
03 -
Z ochroną przed przeładowaniem, przepięciem, przetężeniem, przegrzaniem, zwarciem, zanikiem fazy wejściowej, przepięciem wejściowym, niedopięciem wejściowym, nieprawidłowym ładowaniem akumulatora litowego oraz diagnostyką i wyświetlaniem problemów z ładowaniem.
04 -
W trybie automatycznym urządzenie może ładować się automatycznie, bez nadzoru osoby dorosłej. Posiada również tryb manualny.
05 -
Z funkcją teleskopową; obsługuje bezprzewodową wysyłkę, pozycjonowanie za pomocą podczerwieni oraz komunikację CAN, WIFI lub przewodową.
06 -
Bezprzewodowa komunikacja 2.4G, 4G lub 5.8G. Pozycjonowanie w podczerwieni w trybie nadawczo-odbiorczym, odbiciowym lub rozproszonym. Możliwość dostosowania szczotki i jej wysokości.
07 -
Szeroki zakres napięcia wejściowego zapewnia stabilne i niezawodne ładowanie akumulatora nawet w warunkach niestabilnego zasilania.
08 -
Inteligentna technologia teleskopowa umożliwia ładowanie AGV za pomocą portu ładowania z boku.
09 -
Wysokiej precyzji czujnik fotoelektryczny na podczerwień zapewniający dokładniejsze pozycjonowanie.
010 -
Możliwość ładowania AGV za pomocą portu ładowania z boku, z przodu lub na dole.
011 -
Bezprzewodowa komunikacja umożliwiająca inteligentną komunikację i łączenie ładowarek AGV (jeden AGV z jedną lub różnymi ładowarkami AGV, jedna ładowarka AGV z jednym lub różnymi AGV)
012 -
Szczotka ze stopu stali i węgla o doskonałej przewodności elektrycznej. Wysoka wytrzymałość mechaniczna, doskonała izolacja, wysoka odporność na ciepło i korozję.
013

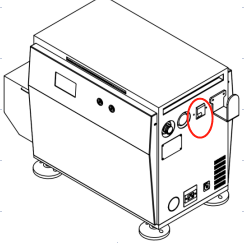
APLIKACJA
Zapewnienie szybkiego, bezpiecznego i AUTOMATYCZNEGO ładowania pojazdów AGV (automatycznie kierowanych), w tym wózków widłowych AGV, podnośników AGV do sortowania logistycznego, AGV z utajoną trakcją, inteligentnych robotów parkingowych, ciężkich pojazdów AGV z trakcją na lotniskach, w portach morskich i kopalniach.






SPECYFIKACJE
| ModelNIE. | AGVC-24V100A-YT |
| OcenionyIwejścieVnapięcie | 220VAC±15% |
| WejścieVnapięcieRanioł | Jednofazowy trójprzewodowy |
| WejścieCobecnyRanioł | <16A |
| OcenionyOwyjściePmoc | 2,4 kW |
| OcenionyOwyjścieCobecny | 100A |
| WyjścieVnapięcieRanioł | 16 V DC-32 V DC |
| AktualnyLimitAregulowanyRanioł | 5A-100A |
| SzczytNoise | ≤1% |
| WoltażRregulacjaAdokładność | ≤±0,5% |
| AktualnySzając | ≤±5% |
| Efektywność | Obciążenie wyjściowe ≥ 50%, przy znamionowej sprawności całkowitej ≥ 92%; |
| Obciążenie wyjściowe <50%, przy znamionowej sprawności całej maszyny ≥99% | |
| Ochrona | Zwarcie, przetężenie, przepięcie, odwrotne podłączenie, prąd wsteczny |
| Częstotliwość | 50Hz-60Hz |
| Współczynnik mocy (PF) | ≥0,99 |
| Zniekształcenie prądu (HD1) | ≤5% |
| WejściePochrona | Przepięcie, podnapięcie, przetężenie |
| PracującyEśrodowiskoCwarunki | Wnętrz |
| PracującyTtemperatura | -20%~45℃, normalna praca; 45℃~65℃, zmniejszona wydajność; powyżej 65℃, wyłączenie. |
| SkładowanieTtemperatura | -40℃- 75℃ |
| WzględnyHwilgotność | 0 – 95% |
| Wysokość | ≤2000m pełne obciążenie wyjściowe; >2000m należy stosować zgodnie z postanowieniami 5.11.2 w GB/T389.2-1993. |
| DielektrykSsiła
| WEJŚCIE-WYJŚCIE: 2800 V DC/10 mA/1 min |
| W POWŁOCE: 2800 V DC/10 mA/1 min | |
| WYJŚCIE: 2800 V DC/10 mA/1 min | |
| Wymiary iWosiem | |
| Wymiary (wszystko w jednym) | 530(wys.)×580(szer.)×390(gł.) |
| InternetWosiem | 35 kg |
| StopieńPochrona | IP20 |
| Innys | |
| BMSCkomunikacjaMmetoda | Komunikacja CAN |
| BMSCpołączenieMmetoda | CAN-WIFI lub fizyczny kontakt modułów CAN w AGV i ładowarce |
| Dyspozytor CkomunikacjaMmetoda | Modbus TCP, Modbus AP |
| Dyspozytor CpołączenieMmetoda | Modbus-Wi-Fi lub Ethernet |
| Pasma WIFI | 2.4G, 4G lub 5.8G |
| Tryb rozpoczęcia ładowania | Podczerwień, Modbus, CAN-WIFI |
| Pojazd AGVPędzel Pparametry | Postępuj zgodnie ze standardem AiPower lub rysunkami dostarczonymi przez klientów |
| StrukturaCcięższy | Wszystko w jednym |
| ŁadowanieMmetoda | Teleskopowanie szczotkowe |
| Metoda chłodzenia | Wymuszone chłodzenie powietrzem |
| TeleskopowyPociągnięcie pędzla | 200 mm |
| Dobry Dodległośćdla Ppozycjonowanie | 185MM-325MM |
| Wysokość odPojazd AGVPędzel od środka do Gokrągły | 90MM-400MM; Możliwość dostosowania |
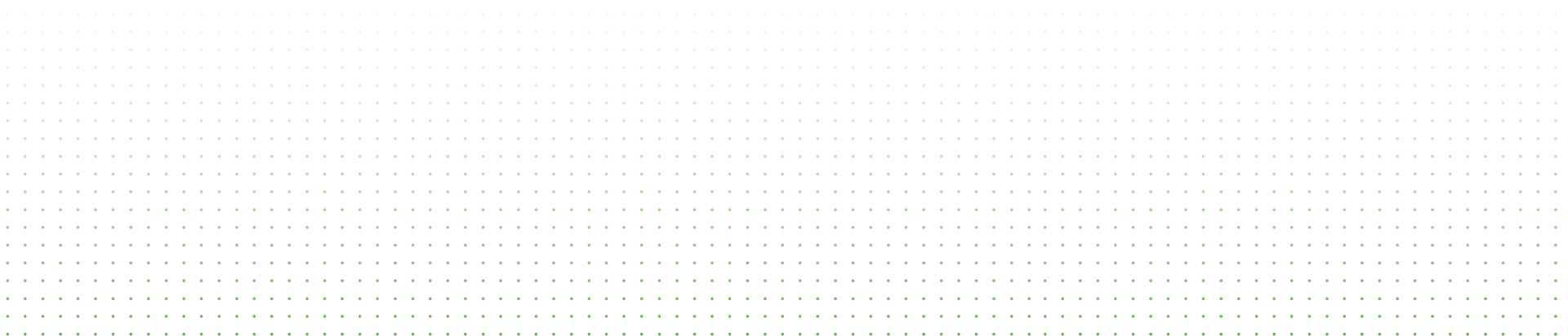
INSTRUKCJA INSTALACJI
Rozpakuj drewnianą skrzynię. Proszę użyć profesjonalnych narzędzi.
2. Za pomocą śrubokręta odkręć śruby mocujące ładowarkę EV znajdujące się na spodzie drewnianej skrzynki.

Postaw ładowarkę poziomo i wyreguluj nóżki, aby zapewnić właściwą pozycję ładowania. Upewnij się, że przeszkody znajdują się w odległości co najmniej 0,5 m od lewej i prawej strony ładowarki.

Pod warunkiem, że ładowarka jest wyłączona, podłącz wtyczkę ładowarki do gniazdka zgodnie z liczbą faz. Prosimy o zlecenie tej czynności fachowcom.

Co robić, a czego nie robić podczas instalacji
- Połóż ładowarkę poziomo. Połóż ładowarkę na czymś odpornym na ciepło. NIE kładź jej do góry nogami. NIE ustawiaj jej na pochyłości.
- Ładowarka wymaga wystarczająco dużo miejsca do chłodzenia. Upewnij się, że odległość między wlotem powietrza a ścianą wynosi co najmniej 300 mm, a odległość między ścianą a wylotem powietrza wynosi co najmniej 1000 mm.
- Ładowarka będzie się nagrzewać podczas pracy. Aby zapewnić odpowiednie chłodzenie, należy upewnić się, że ładowarka pracuje w temperaturze od -20% do 45°C.
- Upewnij się, że do wnętrza ładowarki NIE dostaną się żadne ciała obce, takie jak włókna, kawałki papieru, wióry drewniane lub fragmenty metalu, gdyż może to spowodować pożar.
- Po podłączeniu do zasilania NIE dotykaj szczotki ani elektrody szczotkowej, aby uniknąć ryzyka porażenia prądem.
- Zacisk uziemienia MUSI być dobrze uziemiony, aby zapobiec porażeniu prądem elektrycznym lub pożarowi.

INSTRUKCJA OBSŁUGI
-
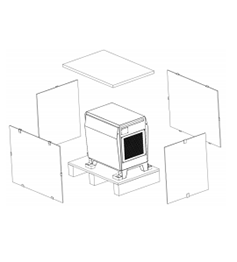
01
Włącz przełącznik, aby przełączyć urządzenie w tryb czuwania.
-
02
2. AGV wyśle sygnał z prośbą o naładowanie, gdy nie będzie miał wystarczającej mocy.
-
03
AGV sam podjedzie do ładowarki i ustawi ją w odpowiedniej pozycji.
-
04
Po prawidłowym ustawieniu ładowarka automatycznie wysunie szczotkę do portu ładowania AGV w celu naładowania AGV.
-
05
Po zakończeniu ładowania szczotka ładowarki automatycznie się schowa, a ładowarka przejdzie w tryb gotowości.

Co robić, a czego nie robić podczas pracy
- Upewnij się, że ładowarka będzie podłączana do źródła zasilania wyłącznie pod nadzorem fachowca.
- Podczas użytkowania ładowarki należy upewnić się, że jest ona sucha i nie ma w niej żadnych obcych przedmiotów.
- Upewnij się, że przeszkody znajdują się w odległości co najmniej 0,5 m od lewej i prawej strony ładowarki.
- Czyść wlot i wylot powietrza co 30 dni kalendarzowych.
- Nie rozmontowuj ładowarki samodzielnie, ponieważ grozi to porażeniem prądem. Ładowarka może ulec uszkodzeniu podczas demontażu, co może skutkować brakiem możliwości skorzystania z serwisu posprzedażowego.



