ਮਾਡਲ ਨੰ.:
AGVC-24V100A-YT ਲਈ ਖਰੀਦਦਾਰੀ
ਉਤਪਾਦ ਦਾ ਨਾਮ:
ਆਟੋਮੇਟਿਡ ਗਾਈਡਡ ਵਾਹਨਾਂ ਲਈ 24V100A ਲਿਥੀਅਮ ਬੈਟਰੀ ਚਾਰਜਰ AGVC-24V100A-YT




ਉਤਪਾਦ ਵੀਡੀਓ
ਨਿਰਦੇਸ਼ ਡਰਾਇੰਗ

ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਅਤੇ ਫਾਇਦੇ
-
PFC+LLC ਸਾਫਟ ਸਵਿਚਿੰਗ ਤਕਨਾਲੋਜੀ ਦੀ ਵਰਤੋਂ ਉੱਚ ਪਾਵਰ ਫੈਕਟਰ, ਘੱਟ ਕਰੰਟ ਹਾਰਮੋਨਿਕਸ, ਛੋਟੀ ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ ਰਿਪਲ, 94% ਤੱਕ ਪਰਿਵਰਤਨ ਕੁਸ਼ਲਤਾ ਅਤੇ ਮੋਡੀਊਲ ਪਾਵਰ ਦੀ ਉੱਚ ਘਣਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
01 -
CAN ਸੰਚਾਰ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਦੇ ਨਾਲ, ਇਹ ਲਿਥੀਅਮ ਬੈਟਰੀ BMS ਨਾਲ ਸੰਚਾਰ ਕਰ ਸਕਦਾ ਹੈ ਤਾਂ ਜੋ ਬੈਟਰੀ ਚਾਰਜਿੰਗ ਨੂੰ ਸਮਝਦਾਰੀ ਨਾਲ ਪ੍ਰਬੰਧਿਤ ਕੀਤਾ ਜਾ ਸਕੇ ਤਾਂ ਜੋ ਤੇਜ਼ ਚਾਰਜਿੰਗ ਅਤੇ ਲੰਬੀ ਬੈਟਰੀ ਲਾਈਫ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ।
02 -
ਦਿੱਖ ਡਿਜ਼ਾਈਨ ਵਿੱਚ ਐਰਗੋਨੋਮਿਕ ਅਤੇ UI ਵਿੱਚ ਉਪਭੋਗਤਾ-ਅਨੁਕੂਲ, ਜਿਸ ਵਿੱਚ LCD ਡਿਸਪਲੇਅ, ਟੱਚ ਪੈਨਲ, LED ਸੰਕੇਤ ਲਾਈਟ ਅਤੇ ਬਟਨ ਸ਼ਾਮਲ ਹਨ। ਅੰਤਮ-ਉਪਭੋਗਤਾ ਚਾਰਜਿੰਗ ਜਾਣਕਾਰੀ ਅਤੇ ਸਥਿਤੀ ਦੇਖ ਸਕਦੇ ਹਨ, ਵੱਖ-ਵੱਖ ਓਪਰੇਸ਼ਨ ਅਤੇ ਸੈਟਿੰਗਾਂ ਕਰ ਸਕਦੇ ਹਨ।
03 -
ਓਵਰਚਾਰਜ, ਓਵਰ-ਵੋਲਟੇਜ, ਓਵਰ-ਕਰੰਟ, ਓਵਰ-ਤਾਪਮਾਨ, ਸ਼ਾਰਟ ਸਰਕਟ, ਇਨਪੁਟ ਫੇਜ਼ ਨੁਕਸਾਨ, ਇਨਪੁਟ ਓਵਰ-ਵੋਲਟੇਜ, ਇਨਪੁਟ ਅੰਡਰ-ਵੋਲਟੇਜ, ਲਿਥੀਅਮ ਬੈਟਰੀ ਅਸਧਾਰਨ ਚਾਰਜਿੰਗ, ਅਤੇ ਚਾਰਜਿੰਗ ਸਮੱਸਿਆਵਾਂ ਦੇ ਨਿਦਾਨ ਅਤੇ ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਸੁਰੱਖਿਆ ਦੇ ਨਾਲ।
04 -
ਆਟੋਮੈਟਿਕ ਮੋਡ ਦੇ ਤਹਿਤ, ਇਹ ਕਿਸੇ ਵਿਅਕਤੀ ਦੀ ਨਿਗਰਾਨੀ ਤੋਂ ਬਿਨਾਂ ਆਪਣੇ ਆਪ ਚਾਰਜ ਹੋ ਸਕਦਾ ਹੈ। ਇਸ ਵਿੱਚ ਮੈਨੂਅਲ ਮੋਡ ਵੀ ਹੈ।
05 -
ਟੈਲੀਸਕੋਪਿੰਗ ਵਿਸ਼ੇਸ਼ਤਾ ਦੇ ਨਾਲ; ਵਾਇਰਲੈੱਸ ਡਿਸਪੈਚਿੰਗ, ਇਨਫਰਾਰੈੱਡ ਪੋਜੀਸ਼ਨਿੰਗ ਅਤੇ CAN, WIFI ਜਾਂ ਵਾਇਰਡ ਸੰਚਾਰ ਦਾ ਸਮਰਥਨ ਕਰਦਾ ਹੈ।
06 -
2.4G, 4G ਜਾਂ 5.8G ਵਾਇਰਲੈੱਸ ਡਿਸਪੈਚਿੰਗ। ਟ੍ਰਾਂਸਮਿਟਿੰਗ-ਰਿਸੀਵਿੰਗ, ਰਿਫਲੈਕਸ਼ਨ ਜਾਂ ਡਿਫਿਊਜ਼ ਰਿਫਲੈਕਸ਼ਨ ਤਰੀਕੇ ਨਾਲ ਇਨਫਰਾਰੈੱਡ ਪੋਜੀਸ਼ਨਿੰਗ। ਬੁਰਸ਼ ਅਤੇ ਬੁਰਸ਼ ਦੀ ਉਚਾਈ ਲਈ ਅਨੁਕੂਲਤਾ ਉਪਲਬਧ ਹੈ।
07 -
ਵਿਆਪਕ ਇਨਪੁੱਟ ਵੋਲਟੇਜ ਰੇਂਜ ਜੋ ਅਸਥਿਰ ਪਾਵਰ ਸਪਲਾਈ ਦੇ ਅਧੀਨ ਸਥਿਰ ਅਤੇ ਭਰੋਸੇਮੰਦ ਚਾਰਜਿੰਗ ਦੇ ਨਾਲ ਬੈਟਰੀ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦੀ ਹੈ।
08 -
ਸਾਈਡ 'ਤੇ ਚਾਰਜਿੰਗ ਪੋਰਟ ਦੇ ਨਾਲ AGV ਲਈ ਚਾਰਜ ਕਰਨ ਦੇ ਯੋਗ ਸਮਾਰਟ ਟੈਲੀਸਕੋਪਿੰਗ ਤਕਨਾਲੋਜੀ।
09 -
ਵਧੇਰੇ ਸਟੀਕ ਸਥਿਤੀ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਉੱਚ-ਸ਼ੁੱਧਤਾ ਵਾਲਾ ਇਨਫਰਾਰੈੱਡ ਫੋਟੋਇਲੈਕਟ੍ਰਿਕ ਸੈਂਸਰ।
010 -
AGV ਲਈ ਚਾਰਜਿੰਗ ਪੋਰਟ ਦੇ ਨਾਲ, ਪਾਸੇ, ਅੱਗੇ ਜਾਂ ਹੇਠਾਂ ਚਾਰਜਿੰਗ ਕਰਨ ਦੇ ਸਮਰੱਥ।
011 -
AGV ਚਾਰਜਰਾਂ ਨੂੰ AGV ਨਾਲ ਸੰਚਾਰ ਕਰਨ ਅਤੇ ਜੋੜਨ ਲਈ ਸਮਾਰਟ ਤਰੀਕੇ ਨਾਲ ਵਾਇਰਲੈੱਸ ਸੰਚਾਰ। (ਇੱਕ AGV ਤੋਂ ਇੱਕ ਜਾਂ ਵੱਖਰੇ AGV ਚਾਰਜਰਾਂ, ਇੱਕ AGV ਚਾਰਜਰ ਤੋਂ ਇੱਕ ਜਾਂ ਵੱਖਰੇ AGV)
012 -
ਸਟੀਲ-ਕਾਰਬਨ ਮਿਸ਼ਰਤ ਬੁਰਸ਼ ਵਧੀਆ ਬਿਜਲੀ ਚਾਲਕਤਾ ਵਾਲਾ। ਮਜ਼ਬੂਤ ਮਕੈਨੀਕਲ ਤਾਕਤ, ਸ਼ਾਨਦਾਰ ਇਨਸੂਲੇਸ਼ਨ, ਵਧੀਆ ਗਰਮੀ ਪ੍ਰਤੀਰੋਧ ਅਤੇ ਉੱਚ ਖੋਰ ਪ੍ਰਤੀਰੋਧ।
013

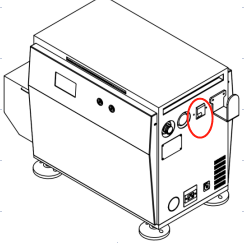
ਅਰਜ਼ੀ
AGV (ਆਟੋਮੇਟਿਡ ਗਾਈਡੇਡ ਵਹੀਕਲ) ਲਈ ਤੇਜ਼, ਸੁਰੱਖਿਅਤ ਅਤੇ ਆਟੋਮੈਟਿਕ ਚਾਰਜਿੰਗ ਪ੍ਰਦਾਨ ਕਰਨਾ ਜਿਸ ਵਿੱਚ AGV ਫੋਰਕਲਿਫਟ, ਲੌਜਿਸਟਿਕਸ ਸੌਰਟਿੰਗ ਜੈਕਿੰਗ AGV, ਲੇਟੈਂਟ ਟ੍ਰੈਕਸ਼ਨ AGV, ਇੰਟੈਲੀਜੈਂਟ ਪਾਰਕਿੰਗ ਰੋਬੋਟ, ਹਵਾਈ ਅੱਡਿਆਂ, ਬੰਦਰਗਾਹਾਂ ਅਤੇ ਖਾਣਾਂ 'ਤੇ ਹੈਵੀ-ਡਿਊਟੀ ਟ੍ਰੈਕਸ਼ਨ AGV ਸ਼ਾਮਲ ਹਨ।






ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ
| Mਓਡੇਲਨਹੀਂ। | AGVC-24V100A-YT ਲਈ ਖਰੀਦਦਾਰੀ |
| ਦਰਜਾ ਦਿੱਤਾ ਗਿਆIਐਨਪੁੱਟVਓਲਟੇਜ | 220VAC±15% |
| ਇਨਪੁੱਟVਓਲਟੇਜRਐਂਜ | ਸਿੰਗਲ-ਫੇਜ਼ ਥ੍ਰੀ-ਵਾਇਰ |
| ਇਨਪੁੱਟCਪਿਸ਼ਾਬRਐਂਜ | <16 ਏ |
| ਦਰਜਾ ਦਿੱਤਾ ਗਿਆOਆਉਟਪੁੱਟPਮਾਲਕ | 2.4 ਕਿਲੋਵਾਟ |
| ਦਰਜਾ ਦਿੱਤਾ ਗਿਆOਆਉਟਪੁੱਟCਪਿਸ਼ਾਬ | 100ਏ |
| ਆਉਟਪੁੱਟVਓਲਟੇਜRਐਂਜ | 16 ਵੀ.ਡੀ.ਸੀ.-32 ਵੀ.ਡੀ.ਸੀ. |
| ਮੌਜੂਦਾLਨਕਲ ਕਰੋAਐਡਜਸਟੇਬਲRਐਂਜ | 5 ਏ-100 ਏ |
| ਸਿਖਰNਓਇਸ | ≤1% |
| ਵੋਲਟੇਜRਇਗੁਲੇਸ਼ਨAਸ਼ੁੱਧਤਾ | ≤±0.5% |
| ਮੌਜੂਦਾSਹਾਰਿੰਗ | ≤±5% |
| ਕੁਸ਼ਲਤਾ | ਆਉਟਪੁੱਟ ਲੋਡ ≥ 50%, ਜਦੋਂ ਦਰਜਾ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਸਮੁੱਚੀ ਕੁਸ਼ਲਤਾ ≥ 92%; |
| ਆਉਟਪੁੱਟ ਲੋਡ <50%, ਜਦੋਂ ਦਰਜਾ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਪੂਰੀ ਮਸ਼ੀਨ ਦੀ ਕੁਸ਼ਲਤਾ ≥99% ਹੁੰਦੀ ਹੈ | |
| ਸੁਰੱਖਿਆ | ਸ਼ਾਰਟ-ਸਰਕਟ, ਓਵਰ-ਕਰੰਟ, ਓਵਰ-ਵੋਲਟੇਜ, ਰਿਵਰਸ ਕਨੈਕਸ਼ਨ, ਰਿਵਰਸ ਕਰੰਟ |
| ਬਾਰੰਬਾਰਤਾ | 50Hz- 60Hz |
| ਪਾਵਰ ਫੈਕਟਰ (PF) | ≥0.99 |
| ਮੌਜੂਦਾ ਵਿਗਾੜ (HD1) | ≤5% |
| ਇਨਪੁੱਟPਰੋਟੈਕਸ਼ਨ | ਓਵਰ-ਵੋਲਟੇਜ, ਅੰਡਰ-ਵੋਲਟੇਜ, ਓਵਰ-ਕਰੰਟ |
| ਕੰਮ ਕਰਨਾEਵਾਤਾਵਰਣCਓਨਡੀਸ਼ਨ | ਅੰਦਰ |
| ਕੰਮ ਕਰਨਾTਸਾਮਰਾਜ | -20%~45℃, ਆਮ ਤੌਰ 'ਤੇ ਕੰਮ ਕਰ ਰਿਹਾ ਹੈ; 45℃~65℃, ਆਉਟਪੁੱਟ ਘਟਾਉਣਾ; 65℃ ਤੋਂ ਵੱਧ, ਬੰਦ। |
| ਸਟੋਰੇਜTਸਾਮਰਾਜ | -40℃- 75℃ |
| ਰਿਸ਼ਤੇਦਾਰHਨਮੀ | 0 - 95% |
| ਉਚਾਈ | ≤2000m ਪੂਰਾ ਲੋਡ ਆਉਟਪੁੱਟ; >2000m ਇਸਨੂੰ GB/T389.2-1993 ਵਿੱਚ 5.11.2 ਦੇ ਉਪਬੰਧਾਂ ਦੇ ਅਨੁਸਾਰ ਵਰਤੋ। |
| ਡਾਈਇਲੈਕਟ੍ਰਿਕSਤਾਕਤ
| ਇਨ-ਆਊਟ: 2800VDC/10mA/1 ਮਿੰਟ |
| ਇਨ-ਸ਼ੈੱਲ: 2800VDC/10mA/1 ਮਿੰਟ | |
| ਆਊਟ-ਸ਼ੈੱਲ: 2800VDC/10mA/1 ਮਿੰਟ | |
| ਮਾਪ ਅਤੇWਅੱਠ | |
| ਮਾਪ (ਸਾਰੇ-ਵਿੱਚ-ਇੱਕ)) | 530(H)×580(W)×390(D) |
| ਨੈੱਟWਅੱਠ | 35 ਕਿਲੋਗ੍ਰਾਮ |
| ਦੀ ਡਿਗਰੀPਰੋਟੈਕਸ਼ਨ | ਆਈਪੀ20 |
| ਹੋਰs | |
| ਬੀ.ਐੱਮ.ਐੱਸ.CਸੰਚਾਰMਸਿਧਾਂਤ | CAN ਸੰਚਾਰ |
| ਬੀ.ਐੱਮ.ਐੱਸ.Cਕਨੈਕਸ਼ਨMਸਿਧਾਂਤ | AGV ਅਤੇ ਚਾਰਜਰ 'ਤੇ CAN ਮਾਡਿਊਲਾਂ ਦਾ CAN-WIFI ਜਾਂ ਭੌਤਿਕ ਸੰਪਰਕ |
| ਡਿਸਪੈਚਿੰਗ ਸੀਸੰਚਾਰMਸਿਧਾਂਤ | ਮੋਡਬਸ ਟੀਸੀਪੀ, ਮੋਡਬਸ ਏਪੀ |
| ਡਿਸਪੈਚਿੰਗ ਸੀਕਨੈਕਸ਼ਨMਸਿਧਾਂਤ | ਮੋਡਬਸ-ਵਾਈਫਾਈ ਜਾਂ ਈਥਰਨੈੱਟ |
| ਵਾਈਫਾਈ ਬੈਂਡ | 2.4G, 4G ਜਾਂ 5.8G |
| ਚਾਰਜਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਦਾ ਢੰਗ | ਇਨਫਰਾਰੈੱਡ, ਮੋਡਬਸ, ਕੈਨ-ਵਾਈਫਾਈ |
| ਏਜੀਵੀਬੁਰਸ਼ ਪੀਅਰਾਮੀਟਰ | ਗਾਹਕਾਂ ਦੁਆਰਾ ਪ੍ਰਦਾਨ ਕੀਤੇ ਗਏ AiPower ਸਟੈਂਡਰਡ ਜਾਂ ਡਰਾਇੰਗਾਂ ਦੀ ਪਾਲਣਾ ਕਰੋ |
| ਦੀ ਬਣਤਰCਹਾਰਗਰ | ਸਾਰੇ ਇੱਕ ਵਿੱਚ |
| ਚਾਰਜਿੰਗMਸਿਧਾਂਤ | ਬੁਰਸ਼ ਟੈਲੀਸਕੋਪਿੰਗ |
| ਠੰਢਾ ਕਰਨ ਦਾ ਤਰੀਕਾ | ਜ਼ਬਰਦਸਤੀ ਹਵਾ ਠੰਢਾ ਕਰਨਾ |
| ਟੈਲੀਸਕੋਪਿਕਬੁਰਸ਼ ਦਾ ਸਟਰੋਕ | 200 ਮਿਲੀਮੀਟਰ |
| ਚੰਗਾ ਡੀਇਤਫ਼ਾਕਪੀ ਲਈਓਸ਼ਨਿੰਗ | 185 ਐਮਐਮ-325 ਐਮਐਮ |
| ਤੋਂ ਉਚਾਈਏਜੀਵੀਬੁਰਸ਼ ਸੈਂਟਰ ਤੋਂ G ਤੱਕਗੋਲ | 90MM-400MM; ਅਨੁਕੂਲਤਾ ਉਪਲਬਧ ਹੈ |
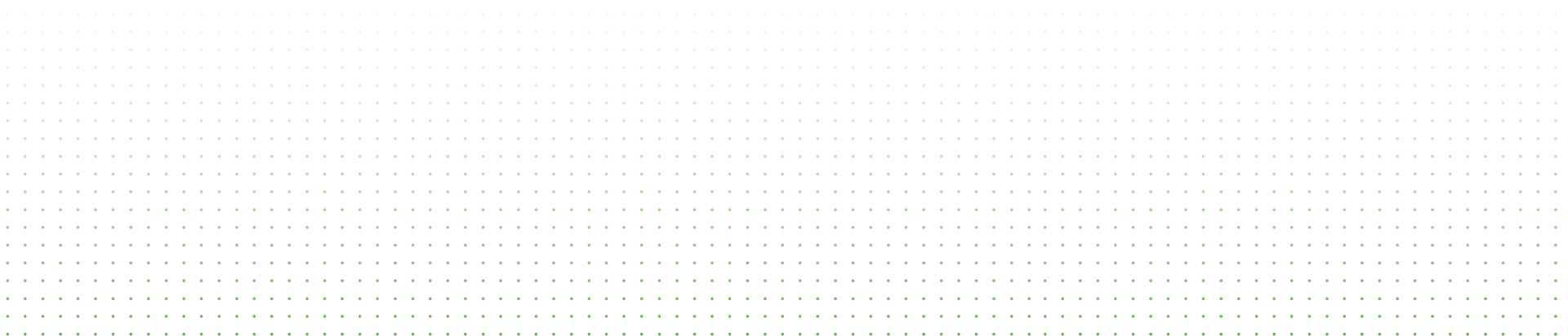
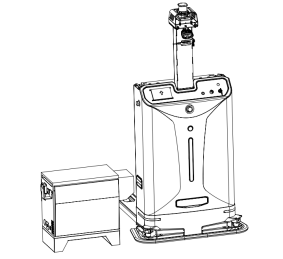
ਇੰਸਟਾਲੇਸ਼ਨ ਗਾਈਡ
ਲੱਕੜ ਦੇ ਡੱਬੇ ਨੂੰ ਖੋਲ੍ਹੋ। ਕਿਰਪਾ ਕਰਕੇ ਪੇਸ਼ੇਵਰ ਔਜ਼ਾਰਾਂ ਦੀ ਵਰਤੋਂ ਕਰੋ।
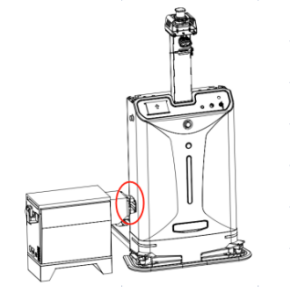
2. ਲੱਕੜ ਦੇ ਡੱਬੇ ਦੇ ਹੇਠਾਂ ਦਿੱਤੇ ਪੇਚਾਂ ਨੂੰ ਵੱਖ ਕਰਨ ਲਈ ਇੱਕ ਸਕ੍ਰਿਊਡ੍ਰਾਈਵਰ ਦੀ ਵਰਤੋਂ ਕਰੋ ਜੋ EV ਚਾਰਜਰ ਨੂੰ ਠੀਕ ਕਰਦੇ ਹਨ।

ਚਾਰਜਰ ਨੂੰ ਖਿਤਿਜੀ 'ਤੇ ਰੱਖੋ ਅਤੇ ਸਹੀ ਚਾਰਜਿੰਗ ਸਥਿਤੀ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਲੱਤਾਂ ਨੂੰ ਐਡਜਸਟ ਕਰੋ। ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਚਾਰਜਰ ਦੇ ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਪਾਸਿਆਂ ਤੋਂ ਰੁਕਾਵਟਾਂ 0.5 ਮੀਟਰ ਤੋਂ ਵੱਧ ਦੂਰ ਹਨ।

ਜੇਕਰ ਚਾਰਜਰ ਦਾ ਸਵਿੱਚ ਬੰਦ ਹੈ, ਤਾਂ ਅਸੀਂ ਫੇਜ਼ ਦੀ ਗਿਣਤੀ ਦੇ ਆਧਾਰ 'ਤੇ ਚਾਰਜਰ ਦੇ ਪਲੱਗ ਨੂੰ ਸਾਕਟ ਨਾਲ ਜੋੜਾਂਗੇ। ਕਿਰਪਾ ਕਰਕੇ ਪੇਸ਼ੇਵਰਾਂ ਨੂੰ ਇਹ ਕੰਮ ਕਰਨ ਲਈ ਕਹੋ।

ਇੰਸਟਾਲੇਸ਼ਨ ਵਿੱਚ ਕੀ ਕਰਨਾ ਹੈ ਅਤੇ ਕੀ ਨਹੀਂ ਕਰਨਾ
- ਚਾਰਜਰ ਨੂੰ ਖਿਤਿਜੀ ਪਾਸੇ ਰੱਖੋ। ਚਾਰਜਰ ਨੂੰ ਕਿਸੇ ਅਜਿਹੀ ਚੀਜ਼ 'ਤੇ ਰੱਖੋ ਜੋ ਗਰਮੀ-ਰੋਧਕ ਹੋਵੇ। ਇਸਨੂੰ ਉਲਟਾ ਨਾ ਰੱਖੋ। ਇਸਨੂੰ ਢਲਾਣ ਵਾਲਾ ਨਾ ਬਣਾਓ।
- ਚਾਰਜਰ ਨੂੰ ਠੰਢਾ ਹੋਣ ਲਈ ਕਾਫ਼ੀ ਜਗ੍ਹਾ ਦੀ ਲੋੜ ਹੈ। ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਏਅਰ ਇਨਲੇਟ ਅਤੇ ਕੰਧ ਵਿਚਕਾਰ ਦੂਰੀ 300mm ਤੋਂ ਵੱਧ ਹੋਵੇ, ਅਤੇ ਕੰਧ ਅਤੇ ਏਅਰ ਆਊਟਲੈੱਟ ਵਿਚਕਾਰ ਦੂਰੀ 1000mm ਤੋਂ ਵੱਧ ਹੋਵੇ।
- ਚਾਰਜਰ ਕੰਮ ਕਰਨ ਵੇਲੇ ਗਰਮੀ ਪੈਦਾ ਕਰੇਗਾ। ਚੰਗੀ ਕੂਲਿੰਗ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ, ਕਿਰਪਾ ਕਰਕੇ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਚਾਰਜਰ ਅਜਿਹੇ ਵਾਤਾਵਰਣ ਵਿੱਚ ਕੰਮ ਕਰਦਾ ਹੈ ਜਿੱਥੇ ਤਾਪਮਾਨ -20%~45℃ ਹੋਵੇ।
- ਇਹ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਵਿਦੇਸ਼ੀ ਵਸਤੂਆਂ ਜਿਵੇਂ ਕਿ ਰੇਸ਼ੇ, ਕਾਗਜ਼ ਦੇ ਟੁਕੜੇ, ਲੱਕੜ ਦੇ ਟੁਕੜੇ ਜਾਂ ਧਾਤ ਦੇ ਟੁਕੜੇ ਚਾਰਜਰ ਦੇ ਅੰਦਰ ਨਾ ਜਾਣ, ਨਹੀਂ ਤਾਂ ਅੱਗ ਲੱਗ ਸਕਦੀ ਹੈ।
- ਪਾਵਰ ਸਪਲਾਈ ਨਾਲ ਜੁੜਨ ਤੋਂ ਬਾਅਦ, ਬਿਜਲੀ ਦੇ ਝਟਕੇ ਦੇ ਜੋਖਮ ਤੋਂ ਬਚਣ ਲਈ ਬੁਰਸ਼ ਜਾਂ ਬੁਰਸ਼ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਨਾ ਛੂਹੋ।
- ਬਿਜਲੀ ਦੇ ਝਟਕੇ ਜਾਂ ਅੱਗ ਤੋਂ ਬਚਣ ਲਈ ਜ਼ਮੀਨੀ ਟਰਮੀਨਲ ਨੂੰ ਚੰਗੀ ਤਰ੍ਹਾਂ ਜ਼ਮੀਨ 'ਤੇ ਰੱਖਿਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।

ਓਪਰੇਸ਼ਨ ਗਾਈਡ
-
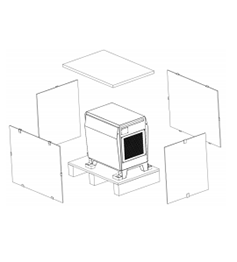
01
ਮਸ਼ੀਨ ਨੂੰ ਸਟੈਂਡਬਾਏ ਮੋਡ ਵਿੱਚ ਰੱਖਣ ਲਈ ਸਵਿੱਚ ਚਾਲੂ ਕਰੋ।
-
02
2. ਜਦੋਂ AGV ਵਿੱਚ ਲੋੜੀਂਦੀ ਪਾਵਰ ਨਹੀਂ ਹੋਵੇਗੀ ਤਾਂ AGV ਚਾਰਜਿੰਗ ਲਈ ਇੱਕ ਸਿਗਨਲ ਭੇਜੇਗਾ।
-
03
AGV ਆਪਣੇ ਆਪ ਚਾਰਜਰ ਵੱਲ ਚਲਾ ਜਾਵੇਗਾ ਅਤੇ ਚਾਰਜਰ ਨਾਲ ਸਥਿਤੀ ਨਿਰਧਾਰਤ ਕਰੇਗਾ।
-
04
ਸਥਿਤੀ ਚੰਗੀ ਤਰ੍ਹਾਂ ਪੂਰੀ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਚਾਰਜਰ ਆਪਣੇ ਆਪ ਹੀ AGV ਨੂੰ ਚਾਰਜ ਕਰਨ ਲਈ AGV ਦੇ ਚਾਰਜਿੰਗ ਪੋਰਟ ਵਿੱਚ ਆਪਣਾ ਬੁਰਸ਼ ਚਿਪਕਾਏਗਾ।
-
05
ਚਾਰਜਿੰਗ ਪੂਰੀ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਚਾਰਜਰ ਦਾ ਬੁਰਸ਼ ਆਪਣੇ ਆਪ ਪਿੱਛੇ ਹਟ ਜਾਵੇਗਾ ਅਤੇ ਚਾਰਜਰ ਦੁਬਾਰਾ ਸਟੈਂਡਬਾਏ ਮੋਡ ਵਿੱਚ ਚਲਾ ਜਾਵੇਗਾ।

ਕੰਮਕਾਜ ਵਿੱਚ ਕੀ ਕਰਨਾ ਹੈ ਅਤੇ ਕੀ ਨਹੀਂ ਕਰਨਾ
- ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਚਾਰਜਰ ਸਿਰਫ਼ ਪੇਸ਼ੇਵਰਾਂ ਦੀ ਅਗਵਾਈ ਹੇਠ ਹੀ ਬਿਜਲੀ ਸਪਲਾਈ ਨਾਲ ਜੁੜਿਆ ਹੋਵੇ।
- ਜਦੋਂ ਵਰਤੋਂ ਵਿੱਚ ਹੋਵੇ ਤਾਂ ਇਹ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਚਾਰਜਰ ਸੁੱਕਾ ਹੋਵੇ ਅਤੇ ਅੰਦਰੋਂ ਵਿਦੇਸ਼ੀ ਵਸਤੂਆਂ ਤੋਂ ਮੁਕਤ ਹੋਵੇ।
- ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਚਾਰਜਰ ਦੇ ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਪਾਸੇ ਰੁਕਾਵਟਾਂ 0.5 ਮੀਟਰ ਤੋਂ ਵੱਧ ਦੂਰ ਹਨ।
- ਹਰ 30 ਕੈਲੰਡਰ ਦਿਨਾਂ ਬਾਅਦ ਹਵਾ ਦੇ ਅੰਦਰ ਜਾਣ ਅਤੇ ਬਾਹਰ ਜਾਣ ਵਾਲੇ ਰਸਤੇ ਨੂੰ ਸਾਫ਼ ਕਰੋ।
- ਚਾਰਜਰ ਨੂੰ ਖੁਦ ਨਾ ਖੋਲ੍ਹੋ, ਨਹੀਂ ਤਾਂ ਬਿਜਲੀ ਦਾ ਝਟਕਾ ਲੱਗ ਸਕਦਾ ਹੈ। ਤੁਹਾਡੇ ਚਾਰਜਰ ਨੂੰ ਵੱਖ ਕਰਨ ਦੌਰਾਨ ਨੁਕਸਾਨ ਪਹੁੰਚ ਸਕਦਾ ਹੈ ਅਤੇ ਇਸ ਕਾਰਨ ਤੁਸੀਂ ਵਿਕਰੀ ਤੋਂ ਬਾਅਦ ਦੀ ਸੇਵਾ ਦਾ ਆਨੰਦ ਨਹੀਂ ਮਾਣ ਸਕਦੇ।



