Numerus exemplaris:
AGVC-24V100A-YT
Nomen Producti:
AGVC-24V100A-YT, Incarcator Accumulatoris Lithii 24V100A, pro Vehiculis Automatice Ductis




VIDEO PRODUCTI
DELINEATIO INSTRUCTIONUM

CHARACTERISTICAE ET COMMODA
-
Technologia commutationis mollis PFC+LLC adhibita est ad factorem potentiae magnum, harmonicas currentis humiles, undulationem tensionis et currentis parvam, efficientiam conversionis usque ad 94% altam, et densitatem potentiae moduli magnam curandam.
01 -
Communicationis CAN facultate, cum BMS acumulatoris lithii communicare potest ut onerationem acumulatoris sapienter administret, quo celeris oneratio et diuturnior vita acumulatoris efficiatur.
02 -
Designatio ergonomica et interfacie usoris facilis, incluso ostentorio LCD, tabula tactili, lumine LED indicativo et bullarum. Usoribus finalibus licet notitias et statum impletionis videre, varias operationes et configurationes facere.
03 -
Cum protectione contra nimium onus, nimium tensionem, nimium currentem, nimium temperaturam, circuitum brevem, amissionem phasis ingressus, nimium tensionem ingressus, nimium tensionem ingressus inferiorem, onerationem abnormalem pilae lithii, et diagnosim et ostentationem problematum onerationis.
04 -
In modo automatico, sine supervisione personae sponte impleri potest. Modum manualem quoque habet.
05 -
Cum functione telescopii; Sustinet expeditionem sine filo, positionem infrarubram, et communicationem CAN, WIFI vel filariam.
06 -
Dispusio sine filis 2.4G, 4G vel 5.8G. Positio infrarubra in modo transmittendi-recipiendi, reflexionis vel reflexionis diffusae. Adaptatio praesto pro penicillo et altitudine penicilli.
07 -
Lata amplitudo tensionis ingressus quae stabilem et fidilem onerationem batteriae sub alimentatione instabili praebere potest.
08 -
Technologia telescopica ingeniosa ad AGV cum portu onerandi in latere onerandum.
09 -
Sensor photoelectricus infrarubrus altae praecisionis ad positionem accuratiorem efficiendam.
010 -
AGV onerare potest cum portu onerandi in latere, in fronte, vel in imo.
011 -
Communicatio sine filis ut ingeniose inducantur ut oneratores AGV communicent et AGV coniungant (unum AGV cum uno vel diversis oneratoribus AGV, unum oneratorem AGV cum uno vel diversis AGV).
012 -
Penicillus ex chalybe et carbone confectus, magna conductivitate electrica praeditus. Fortis roboris mechanici, optima insulatione, magna resistentia caloris et alta resistentia corrosionis.
013

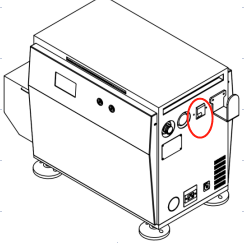
APPLICATIO
Ad celerem, tutam et AUTOMATICAM onerationem praebendam pro AGV (Vehiculis Automatice Ductis), inter quas sunt furcae elevatoriae AGV, elevatoriae ad logisticam separandam, AGV tractionis latentis, automata stationaria intelligentia, AGV tractionis gravis officii in aeroportubus, portubus maritimis et metallis.






SPECIFICATIONES
| MexemplarNon. | AGVC-24V100A-YT |
| AestimatusIinputatioVamplitudo | 220VAC±15% |
| InputumVamplitudoRange | Trifilaris monophasis |
| InputumCcurrensRange | <16A |
| AestimatusOexitusPpotens | 2.4 kW |
| AestimatusOexitusCcurrens | 100A |
| ExitusVamplitudoRange | 16VDC-32VDC |
| CurrensLmittereAadaptabilisRange | 5A-100A |
| CulmenNsonus | ≤1% |
| Tensio electricaRregulatioAaccuratio | ≤±0.5% |
| CurrensScommunicatio | ≤±5% |
| Efficacia | Onus emissum ≥ 50%, cum aestimatum est, efficientia generalis ≥ 92%; |
| Onus productum <50%, cum aestimatum est, efficientia totius machinae est ≥99% | |
| Protectio | Circuitus brevis, nimia intensitas, nimia tensio, nexus inversus, intensitas inversa |
| Frequentia | 50Hz-60Hz |
| Factor Potentiae (PF) | ≥0.99 |
| Distortio Currentis (HD1) | ≤5% |
| InputumPprotectio | Supertensio, subtensio, superfluus |
| LaboransEambitusCcondiciones | Intra |
| LaboransTtemperatura | -20%~45℃, normaliter operans; 45℃~65℃, productionem reducens; supra 65℃, clauditur. |
| RepositoriumTtemperatura | -40℃-75℃ |
| RelativusHumiditas | 0 – 95% |
| Altitudo | ≤2000m pleno onere egressus; Si plus quam 2000m extenditur, secundum provisiones 5.11.2 in GB/T389.2-1993 utere. |
| DielectricumSrobur
| INGRESSUS-EXITUS: 2800VDC/10mA/1Min |
| IN TESTA: 2800VDC/10mA/1Min | |
| INVOLUCRUM EXTERNUM: 2800VDC/10mA/1Min | |
| Dimensiones etWocto | |
| Dimensiones (omnia in uno) | 530 (A) × 580 (L) × 390 (P) |
| ReteWocto | 35 kg |
| GradusPprotectio | IP20 |
| Alias | |
| Systema Administrationis Computatralis (SMA)CcommunicatioMmethodus | Communicatio CAN |
| Systema Administrationis Computatralis (SMA)CnexusMmethodus | CAN-WIFI vel contactus physicus modulorum CAN apud AGV et caricatrum |
| Missio CcommunicatioMmethodus | Modbus TCP, Modbus AP |
| Missio CnexusMmethodus | Modbus-wifi vel Ethernet |
| Taeniae WIFI | 2.4G, 4G vel 5.8G |
| Modus Incipiendi Impletionem | Infra-rubrum, Modbus, CAN-WIFI |
| AGVPenicillo Pametra | Sequere normas AiPower vel delineationes a clientibus datas. |
| StructuraCHarger | Omnia in uno |
| ImpletioMmethodus | Penicillo Telescopico |
| Methodus refrigerationis | Refrigeratio aeris coacti |
| TelescopicumIctus Penicilli | 200MM |
| Bonus D.distantiapro Ppositio | 185MM-325MM |
| Altitudo abAGVCentrum penicilli ad Grotundus | 90MM-400MM; Customization praesto est |
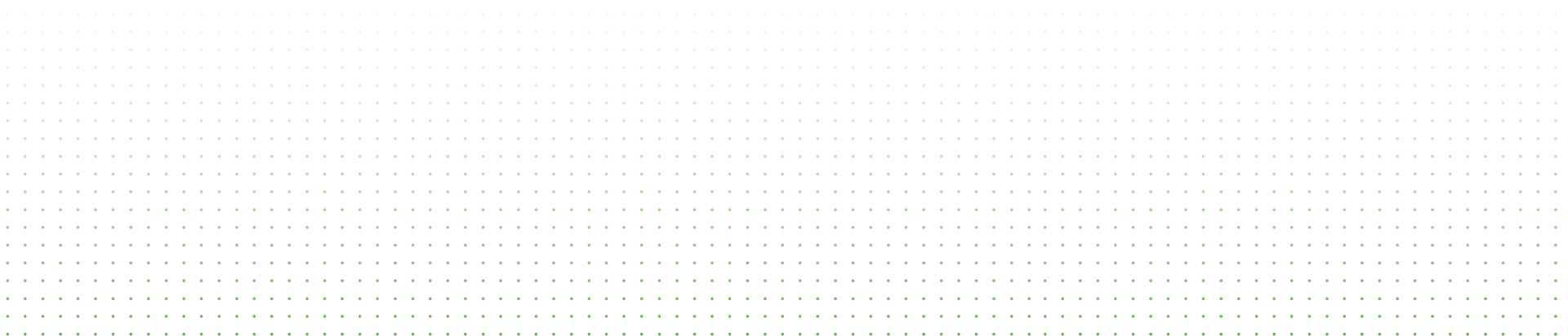
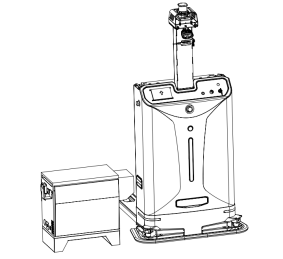
DUCTOR INSTITUTIONIS
Arcam ligneam ex sarcina remove. Instrumentis professionalibus utere, quaeso.
2. Cochleas in fundo arcae ligneae, quibus onus vehiculi electrici figitur, disiunge, cochleis utere.

Pone caricatrum in horizontali et crura compone ut recta positio caricatri sit. Fac ut impedimenta plus quam 0.5m a latere sinistro et dextro caricatri absint.

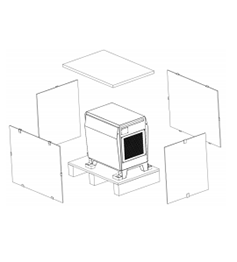
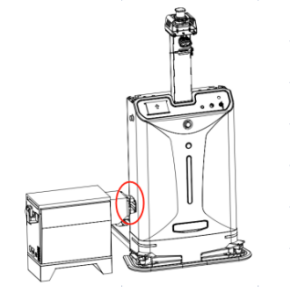
Si interruttor oneratoris exstinctus est, spinam oneratoris cum receptaculo secundum numerum phasium coniunge. Quaeso, peritos hoc opus facere roga.

Quae Facere et Quae Non Facere in Installatione
- Caricatorem horizontaliter pone. Caricatorem super aliquid calori resistente pone. NOLI inversum ponere. NOLI inclinare.
- Spatium satis ad refrigerandum requirit caricatro. Fac ut spatium inter introitum aeris et parietem plus quam 300mm sit, et spatium inter parietem et exitum aeris plus quam 1000mm sit.
- Impulsor calorem producet dum operatur. Ut bona refrigeratio fiat, fac ut impulsor in ambitu operetur ubi temperatura -20%~45℃ est.
- Fac ut res alienae, ut fibrae, frustula chartae, lignei frustula, vel fragmenta metallica, NON intrent in caricatorem, alioquin ignis excitari potest.
- Postquam cum fonte potentiae coniunctum est, penicillum aut electrodum penicilli NE tangas ne periculum ictus electrici exeas.
- Terminalis terrae bene ad terram coniunctus esse DEBET ne impetus electricus aut ignis fiat.

DUCTOR OPERATIONIS
-
01
Interruptorem accende ut machinam in modum quietis ponas.
-
02
2. AGV signum mittet petens onerationem cum AGV non satis potentiae habeat.
-
03
Vehiculum AGV per se ad caricatorem movebit et cum caricatore positionem faciet.
-
04
Postquam positio bene perfecta est, caricator penicillum suum sponte in portum caricationis AGV extrudet ad AGV onerandum.
-
05
Postquam impletio perfecta est, penicillum impletoris sponte retrahetur et impletor iterum ad modum quietis transibit.

Quae Facere et Quae Non Facere in Operatione
- Fac ut solum sub ductu peritorum caricatrum cum fonte potentiae coniungatur.
- Fac ut caricator siccus sit et sine rebus externis intus, cum in usu est.
- Fac ut obstacula plus quam 0.5m a latere sinistro et dextro caricatoris absint.
- Introitum et exitum aeris singulis triginta diebus calendariis purga.
- Noli ipse caricatrum disiungere, alioquin ictum electricum fiet. Carcatrum laedi potest dum disiungis et propterea servitio post-venditionis non frui potes.



