Numero di modello:
AGVC-24V100A-YT
Nome del prodotto:
Caricabatterie per batterie al litio 24V100A AGVC-24V100A-YT per veicoli a guida automatica




VIDEO DEL PRODOTTO
DISEGNO DI ISTRUZIONI

CARATTERISTICHE E VANTAGGI
-
Tecnologia di commutazione soft PFC+LLC utilizzata per garantire un elevato fattore di potenza, basse armoniche di corrente, piccole ondulazioni di tensione e corrente, efficienza di conversione fino al 94% e un'elevata densità di potenza del modulo.
01 -
Grazie alla funzionalità di comunicazione CAN, è possibile comunicare con il BMS della batteria al litio per gestire in modo intelligente la carica della batteria, garantendo una ricarica rapida e una maggiore durata della batteria.
02 -
Design ergonomico e interfaccia utente intuitiva, con display LCD, pannello touch, indicatori LED e pulsanti. Gli utenti finali possono visualizzare informazioni e stato di carica, nonché eseguire diverse operazioni e impostazioni.
03 -
Con protezione da sovraccarico, sovratensione, sovracorrente, sovratemperatura, cortocircuito, perdita di fase in ingresso, sovratensione in ingresso, sottotensione in ingresso, carica anomala della batteria al litio e diagnosi e visualizzazione dei problemi di carica.
04 -
In modalità automatica, può caricarsi automaticamente senza la supervisione di una persona. È disponibile anche la modalità manuale.
05 -
Con funzione telescopica; supporta la spedizione wireless, il posizionamento a infrarossi e la comunicazione CAN, WIFI o cablata.
06 -
Dispacciamento wireless 2.4G, 4G o 5.8G. Posizionamento a infrarossi in modalità trasmissione-ricezione, riflessione o riflessione diffusa. Personalizzazione disponibile per pennello e altezza del pennello.
07 -
Ampio intervallo di tensione di ingresso in grado di garantire una ricarica stabile e affidabile della batteria anche in caso di alimentazione instabile.
08 -
Tecnologia telescopica intelligente per poter ricaricare gli AGV tramite la porta di ricarica laterale.
09 -
Sensore fotoelettrico a infrarossi ad alta precisione per garantire un posizionamento più preciso.
010 -
Possibilità di ricaricare l'AGV tramite la porta di ricarica laterale, anteriore o inferiore.
011 -
Comunicazione wireless per far comunicare e connettere in modo intelligente i caricatori AGV (un AGV a uno o più caricatori AGV, un caricabatteria AGV a uno o più AGV)
012 -
Spazzola in lega di acciaio e carbonio con elevata conduttività elettrica. Elevata resistenza meccanica, eccellente isolamento, elevata resistenza al calore e alla corrosione.
013

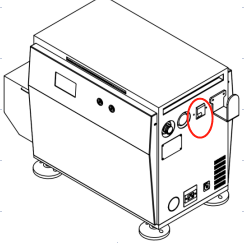
APPLICAZIONE
Per garantire una ricarica rapida, sicura e AUTOMATICA per AGV (veicoli a guida automatica), tra cui carrelli elevatori AGV, AGV per la logistica e lo smistamento, AGV a trazione latente, robot di parcheggio intelligenti, AGV a trazione pesante in aeroporti, porti marittimi e miniere.






SPECIFICHE
| MmodelloNO. | AGVC-24V100A-YT |
| ValutatoIingressoVtensione | 220 V CA ± 15% |
| IngressoVtensioneRangelo | Monofase a tre fili |
| IngressoCattualeRangelo | <16A |
| ValutatoOrisultatoPpotenza | 2,4 kW |
| ValutatoOrisultatoCattuale | 100A |
| ProduzioneVtensioneRangelo | 16 V CC-32 V CC |
| AttualeLimitareAregolabileRangelo | 5A-100A |
| PiccoNoise | ≤1% |
| VoltaggioRregolamentazioneAprecisione | ≤±0,5% |
| AttualeScondivisione | ≤±5% |
| Efficienza | Carico di uscita ≥ 50%, quando nominale, efficienza complessiva ≥ 92%; |
| Carico di uscita <50%, quando nominale, l'efficienza dell'intera macchina è ≥99% | |
| Protezione | Cortocircuito, sovracorrente, sovratensione, collegamento inverso, corrente inversa |
| Frequenza | 50Hz-60Hz |
| Fattore di potenza (PF) | ≥0,99 |
| Distorsione di corrente (HD1) | ≤5% |
| IngressoPprotezione | Sovratensione, sottotensione, sovracorrente |
| LavorandoEambienteCcondizioni | Interno |
| LavorandoTtemperatura | -20%~45℃, funzionamento normale; 45℃~65℃, riduzione della potenza; oltre 65℃, spegnimento. |
| MagazzinaggioTtemperatura | -40℃- 75℃ |
| RelativoHumidità | 0 – 95% |
| Altitudine | ≤2000m di potenza in uscita a pieno carico; >2000m utilizzarlo in conformità alle disposizioni del 5.11.2 in GB/T389.2-1993. |
| DielettricoSforza
| INGRESSO-USCITA: 2800 V CC/10 mA/1 min |
| IN-SHELL: 2800 V CC/10 mA/1 min | |
| USCITA: 2800 V CC/10 mA/1 min | |
| Dimensioni eWotto | |
| Dimensioni (tutto in uno) | 530 (A) × 580 (L) × 390 (P) |
| NettoWotto | 35 kg |
| Grado diPprotezione | IP20 |
| Altros | |
| BMSCcomunicazioneMmetodo | Comunicazione CAN |
| BMSCconnessioneMmetodo | CAN-WIFI o contatto fisico dei moduli CAN su AGV e caricabatterie |
| Spedizione CcomunicazioneMmetodo | Modbus TCP, Modbus AP |
| Spedizione CconnessioneMmetodo | Modbus-wifi o Ethernet |
| Bande WIFI | 2.4G, 4G o 5.8G |
| Modalità di avvio della carica | Infrarossi, Modbus, CAN-WIFI |
| AGVPennello Pparametri | Seguire lo standard AiPower o i disegni forniti dai clienti |
| Struttura diCpiù forte | Tutto in uno |
| RicaricaMmetodo | Spazzola telescopica |
| Metodo di raffreddamento | Raffreddamento ad aria forzata |
| TelescopicColpo di pennello | 200MM |
| Buono Distanzaper Pposizionamento | 185MM-325MM |
| Altezza daAGVCentro del pennello verso Ggirare | 90MM-400MM; Personalizzazione disponibile |
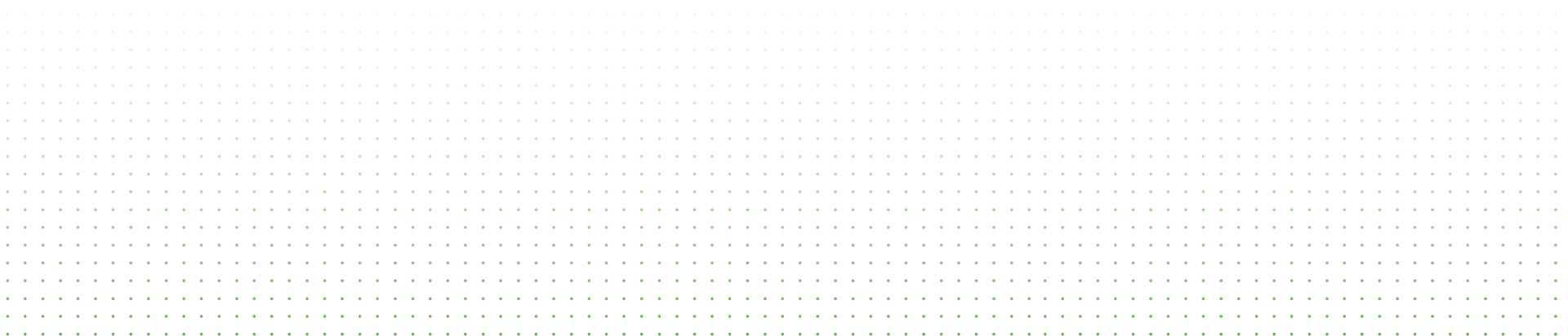
GUIDA ALL'INSTALLAZIONE
Disimballare la scatola di legno. Si prega di utilizzare attrezzi professionali.
2. Utilizzare un cacciavite per smontare le viti sul fondo della scatola di legno che fissano il caricabatterie per veicoli elettrici.

Posizionare il caricabatterie in orizzontale e regolare i piedini per garantire la corretta posizione di ricarica. Assicurarsi che gli ostacoli siano a più di 0,5 m di distanza dai lati sinistro e destro del caricabatterie.

A condizione che l'interruttore del caricabatterie sia spento, collegheremo la spina del caricabatterie alla presa in base al numero di fasi. Si prega di chiedere a un professionista di eseguire questo lavoro.

Cosa fare e cosa non fare durante l'installazione
- Posizionare il caricabatterie in posizione orizzontale. Posizionare il caricabatterie su un supporto resistente al calore. NON capovolgerlo. NON inclinarlo.
- Il caricabatterie necessita di spazio sufficiente per il raffreddamento. Assicurarsi che la distanza tra la presa d'aria e la parete sia superiore a 300 mm e che la distanza tra la parete e l'uscita dell'aria sia superiore a 1000 mm.
- Il caricabatterie genera calore durante il funzionamento. Per garantire un buon raffreddamento, assicurarsi che il caricabatterie funzioni in un ambiente con temperatura compresa tra -20% e 45°C.
- Assicurarsi che oggetti estranei come fibre, pezzi di carta, trucioli di legno o frammenti di metallo NON entrino nel caricabatterie, altrimenti potrebbero verificarsi incendi.
- Dopo aver collegato l'apparecchio all'alimentazione elettrica, NON toccare la spazzola o l'elettrodo della spazzola per evitare il rischio di scosse elettriche.
- Il terminale di terra DEVE essere ben collegato a terra per evitare scosse elettriche o incendi.

GUIDA OPERATIVA
-
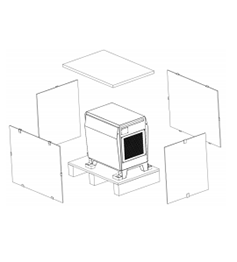
01
Accendere l'interruttore per mettere la macchina in modalità standby.
-
02
2. L'AGV invierà un segnale per richiedere la ricarica quando non avrà abbastanza energia.
-
03
L'AGV si sposterà autonomamente verso il caricabatterie e si posizionerà con esso.
-
04
Dopo aver eseguito correttamente il posizionamento, il caricabatterie inserirà automaticamente la sua spazzola nella porta di ricarica dell'AGV per caricare l'AGV.
-
05
Una volta completata la ricarica, la spazzola del caricabatterie si ritrarrà automaticamente e il caricabatterie tornerà in modalità standby.

Cosa fare e cosa non fare durante l'operazione
- Assicurarsi che il caricabatterie venga collegato all'alimentazione elettrica solo sotto la supervisione di professionisti.
- Assicurarsi che il caricabatterie sia asciutto e privo di corpi estranei al suo interno quando è in uso.
- Assicurarsi che gli ostacoli siano a più di 0,5 m di distanza dal lato sinistro e destro del caricabatterie.
- Pulire l'ingresso e l'uscita dell'aria ogni 30 giorni di calendario.
- Non smontare il caricabatterie da soli, altrimenti si corre il rischio di scosse elettriche. Il caricabatterie potrebbe danneggiarsi durante lo smontaggio e, di conseguenza, non sarà possibile usufruire dell'assistenza post-vendita.



