Nimewo Modèl:
AGVC-24V100A-YT
Non pwodwi:
Chargeur batri ityòm 24V100A AGVC-24V100A-YT pou machin gide otomatik




VIDEYO PWODWI
DESEN ENSTRIKSYON

KARAKTERISTIK AK AVANTAJ
-
Teknoloji switch mou PFC+LLC a itilize pou asire yon faktè pouvwa ki wo, amonik aktyèl ki ba, ti ondilasyon vòltaj ak aktyèl, efikasite konvèsyon ki rive jiska 94% ak yon dansite pouvwa modil ki wo.
01 -
Avèk karakteristik kominikasyon CAN, li ka kominike avèk BMS batri ityòm pou jere chaje batri a avèk entèlijans pou asire yon chaje rapid ak yon lavi batri ki pi long.
02 -
Design ergonomik nan aparans ak koòdone itilizatè fasil pou itilize, ki gen ladan ekran LCD, panèl taktil, limyè endikasyon LED ak bouton. Itilizatè final yo ka wè enfòmasyon ak estati chaj la, fè diferan operasyon ak paramèt.
03 -
Avèk pwoteksyon kont surchaj, survòltaj, surkouran, surtanperati, kous kout, pèt faz antre, survòltaj antre, sousvòltaj antre, chaj anòmal batri ityòm, epi dyagnostik ak ekspozisyon pwoblèm chaje.
04 -
An mòd otomatik, li ka chaje otomatikman san sipèvizyon yon moun. Li genyen tou mòd manyèl.
05 -
Avèk karakteristik teleskopik; Sipòte dispatch san fil, pozisyonman enfrawouj ak kominikasyon CAN, WIFI oswa filaire.
06 -
Dispatch san fil 2.4G, 4G oubyen 5.8G. Pozisyonman enfrawouj nan fason transmisyon-resepsyon, refleksyon oubyen refleksyon difize. Pèsonalizasyon disponib pou bwòs la ak wotè bwòs la.
07 -
Laj ranje vòltaj opinyon ki ka bay batri a yon chaj ki estab e serye anba yon ekipman pou pouvwa enstab.
08 -
Teknoloji teleskopik entelijan pou kapab chaje pou AGV ak pò chaje sou kote a.
09 -
Capteur fotoelektrik enfrawouj ki gen gwo presizyon pou asire yon pozisyonman ki pi presi.
010 -
Kapab chaje pou AGV ak pò chaje sou kote a, devan an oswa anba.
011 -
Kominikasyon san fil pou fè chajè AGV yo kominike epi konekte AGV yo yon fason entelijan. (Yon AGV ak youn oubyen plizyè chajè AGV, yon chajè AGV ak youn oubyen plizyè AGV)
012 -
Bwòs alyaj asye-kabòn ak gwo konduktivite elektrik. Gwo fòs mekanik, ekselan izolasyon, gwo rezistans chalè ak gwo rezistans korozyon.
013

APLIKASYON
Pou bay chaj rapid, an sekirite ak OTOMATIK pou AGV (Veyikil Gide Otomatik) ki gen ladan chariot élévateur AGV, AGV pou triyaj lojistik, AGV ak traksyon laten, robo pakin entelijan, AGV ak traksyon lou nan ayewopò, pò maritim ak min.






ESPESIFIKASYON
| MmodèlNon. | AGVC-24V100A-YT |
| EvalyeIantreVvòltaj | 220VAC±15% |
| AntreVvòltajRzanj | Yon sèl faz twa fil |
| AntreCaktyèlRzanj | <16A |
| EvalyeOpwodiksyonPpouvwa | 2.4KW |
| EvalyeOpwodiksyonCaktyèl | 100A |
| SòtiVvòltajRzanj | 16VDC-32VDC |
| KouranLendiferanAreglablRzanj | 5A-100A |
| PikNzwa | ≤1% |
| VòltajRrèglemanApresizyon | ≤±0.5% |
| KouranSpataje | ≤±5% |
| Efikasite | Chaj pwodiksyon ≥ 50%, lè rated, efikasite jeneral la ≥ 92%; |
| Chaj pwodiksyon <50%, lè li rated, efikasite machin nan antye se ≥99% | |
| Pwoteksyon | Kout sikwi, twòp kouran, twòp vòltaj, koneksyon envès, kouran envès |
| Frekans | 50Hz-60Hz |
| Faktè pouvwa (PF) | ≥0.99 |
| Distòsyon aktyèl (HD1) | ≤5% |
| AntrePpwoteksyon | Twòp vòltaj, anba vòltaj, twòp kouran |
| Ap travayEanviwònmanCkondisyon | Andedan kay la |
| Ap travayTtanperati | -20% ~ 45 ℃, ap travay nòmalman; 45 ℃ ~ 65 ℃, diminye pwodiksyon; plis pase 65 ℃, fèmen. |
| DepoTtanperati | -40℃- 75℃ |
| RelatifHimidite | 0 – 95% |
| Altitid | ≤2000m pwodiksyon plen chaj; Pou yon distans >2000m, sèvi ak li an akò avèk dispozisyon 5.11.2 nan GB/T389.2-1993. |
| DielektrikSfòs
| ANTRE-SÒTI: 2800VDC/10mA/1Min |
| AN KOKIY: 2800VDC/10mA/1Min | |
| KOKIYAJ EKSTERYÈ: 2800VDC/10mA/1Min | |
| Dimansyon akWuit | |
| Dimansyon (tout-an-yon) | 530 (Wotè) × 580 (Lajè) × 390 (Pwofondè) |
| NètWuit | 35Kg |
| Degre nanPpwoteksyon | IP20 |
| Lòts | |
| BMSCkominikasyonMmetòd | Kominikasyon CAN |
| BMSCkoneksyonMmetòd | CAN-WIFI oubyen kontak fizik modil CAN yo nan AGV ak chajè a |
| Dispatch CkominikasyonMmetòd | Modbus TCP, Modbus AP |
| Dispatch CkoneksyonMmetòd | Modbus-wifi oubyen Ethernet |
| Gwoup Wifi | 2.4G, 4G oubyen 5.8G |
| Mòd pou kòmanse chaje | Enfrawouj, Modbus, CAN-WIFI |
| AGVBwòs Pametramèt | Swiv estanda AiPower la oswa desen kliyan yo bay yo. |
| Estrikti nanCharger | Tout nan yon sèl |
| ChajeMmetòd | Bwòs Teleskopik |
| Metòd refwadisman | Refwadisman lè fòse |
| TeleskopikKout bwòs | 200MM |
| Bon Ddistanspou Ppozisyonman | 185MM-325MM |
| Wotè soti nanAGVSant bwòs la rive nan G awon | 90MM-400MM; Pèsonalizasyon disponib |
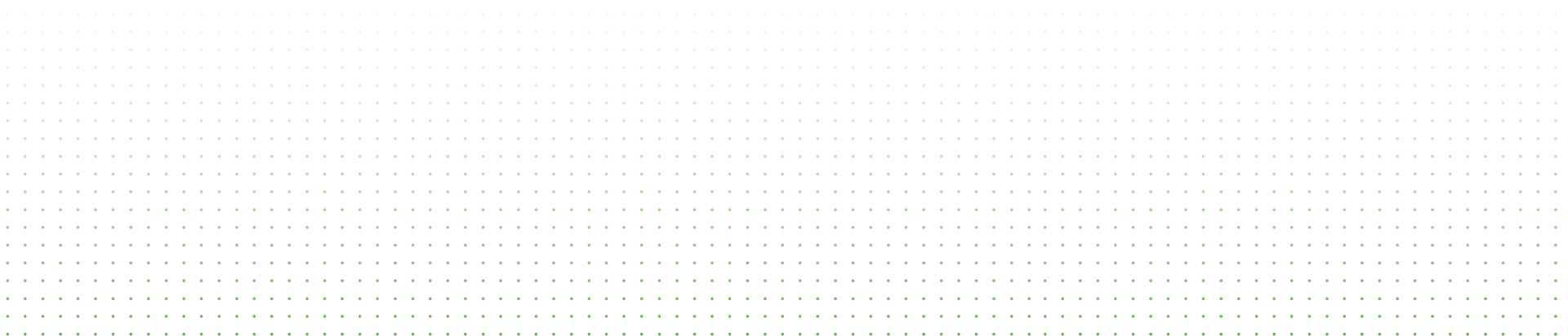
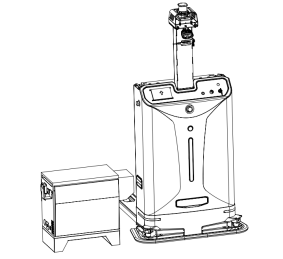
GID ENSTALASYON
Depake bwat an bwa a. Tanpri sèvi ak zouti pwofesyonèl.
2. Sèvi ak yon tournevis pou demonte vis ki nan pati anba bwat an bwa a ki fikse plato EV a.

Mete plato a orizontal epi ajiste pye yo pou asire bon pozisyon pou chaje a. Asire w ke gen plis pase 0.5M lwen obstak yo soti bò gòch ak bò dwat plato a.

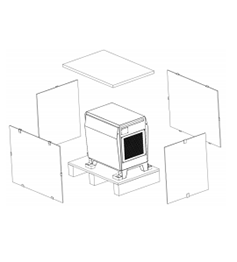
Si switch chargeur a etenn, konekte ploge chargeur a ak priz la selon kantite faz yo. Mande pwofesyonèl pou fè travay sa a tanpri.

Sa pou fè ak sa pou pa fè nan enstalasyon
- Mete plato a orizontal. Mete plato a sou yon bagay ki reziste chalè. PA mete l tèt anba. PA fè l panche.
- Chajè a bezwen ase espas pou refwadi. Asire w ke distans ki genyen ant antre lè a ak miray la se plis pase 300mm, epi distans ki genyen ant miray la ak sòti lè a se plis pase 1000mm.
- Chajè a ap pwodui chalè lè l ap fonksyone. Pou asire bon refwadisman, tanpri asire w ke chajè a ap travay nan yon anviwònman kote tanperati a se -20% ~ 45 ℃.
- Asire w ke objè etranje tankou fib, moso papye, bato bwa oswa fragman metal PA antre andedan plato a, sinon li ka pran dife.
- Apre ou fin konekte bwòs la ak ekipman pou kouran an, PA touche bwòs la oswa elektwòd bwòs la pou evite risk pou ou pran chòk elektrik.
- Tèminal tè a DWE byen konekte atè pou anpeche chòk elektrik oswa dife.

GID OPERASYON
-
01
Limen switch la pou mete machin nan nan mòd sibstiti.
-
02
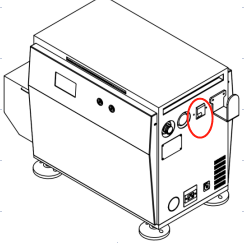
2. AGV a ap voye yon siyal pou mande pou chaje lè AGV a pa gen ase pouvwa.
-
03
AGV a ap deplase poukont li nan chajè a epi li pral pozisyone tèt li avèk chajè a.
-
04
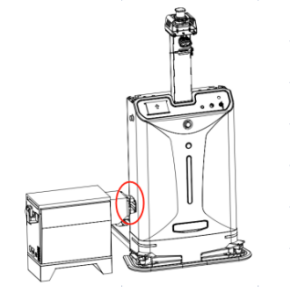
Apre yo fin byen pozisyone chajè a, chajè a ap otomatikman mete bwòs li nan pò chaje AGV a pou chaje AGV a.
-
05
Apre chajman an fini, bwòs chargeur a ap retire otomatikman epi chargeur a ap antre nan mòd sibstiti ankò.

Sa pou fè ak sa pou pa fè nan operasyon
- Asire w ke se sèlman anba sipèvizyon pwofesyonèl yo ke plato a pral konekte ak ekipman pou kouran an.
- Asire w ke plato a sèk epi pa gen objè etranje anndan l lè w ap itilize l.
- Asire w ke obstak yo plis pase 0.5M lwen bò gòch ak bò dwat plato a.
- Netwaye antre ak sòti lè a chak 30 jou kalandriye.
- Pa demonte chargeur a poukont ou, sinon ou ka pran yon chòk elektrik. Chargeur a ka domaje pandan w ap demonte l epi ou ka pa jwenn sèvis apre-vant lan poutèt sa.



